
Тут увидел интересную мысль -- уж коли все равно к плоттеру автопилот подключен, то сигнал gps брать с плоттера. Правда тогда по азимуту без плоттера не походишь, но у меня реально плоттер всегда на палубе, даже если иду по знакомым месстам. Просто нравится смотреть на карту, скорость, глубину...
Наше



Авторулевой своими руками
Автор
StrangerM
, 28 дек 2011 11:44
Сообщений в теме: 659
#227

Moder
-

- Администратор
-

- 2 212 сообщений
Яхтенный капитан
- Из:Москва
-
Судно: 34 фута
-
Название: Ирида
Отправлено 25 марта 2018 - 00:43
Вот такой модуль хочу поставить, кто-нибудь пробовал? https://www.ebay.com...119.m1438.l2649
#228
Aleksk
-

- Капитан
-

- 13 763 сообщений
Яхтенный капитан
- Из:Ленинград
-
Судно: ⛵
-
Название: Неспешный
Отправлено 26 марта 2018 - 00:30
Вот такой модуль хочу поставить, кто-нибудь пробовал? https://www.ebay.com...119.m1438.l2649это судя по скриншоту
Потроха модуля , судя про скриншоту, представляют собой u-blox7. http://www.leapsecon...yax/RYN25AI.pdf
Я использовал похожий, в нем тоже начинка u-blox7.
Есть нюанс. Однотипные модули имеют различия. Одни помнят настройки в ПЗУ , другие только пока не разрядился ионистор (у меня меньше суток).
По дефолту у них не выходе NMEA протокол с частотой 1 герц, скорость порта 9600 (я её не изменял, хотя это можно сделать всего один раз из-за фьюзов).
Для увеличения частоты до 5 или 10 герц, надо изменить настройки в программе u-center для модулей которые запоминают из в ПЗУ.
(полезно также отключить лишние строки сообщений).
В противном случае настройки придется пулять в виде шестнадцатеричного дампа каждый раз при запуске модуля (я так делаю).
Собственно вот такие строки пуляются в модуль (контрольные суммы в конце строк не показаны) ---
B5 62 06 01 08 00 F0 00 01 00 01 01 01 01 - отключение строки
B5 62 06 01 08 00 F0 01 01 00 01 01 01 01 - отключение строки
B5 62 06 01 08 00 F0 02 01 00 01 01 01 01 - отключение строки
B5 62 06 01 08 00 F0 03 01 00 01 01 01 01 - отключение строки
B5 62 06 01 08 00 F0 04 01 01 01 01 01 01 - включение строки $GPRMC
B5 62 06 01 08 00 F0 05 01 00 01 01 01 01 - отключение строки
B5 62 06 08 06 00 C8 00 01 00 01 00 - выставляем 5 Hz
На бейсике для одной строки и 5 Гц это выглядит так (включая контрольную сумму , которая нужна для протокола обмена с модулем GPS) -----
Rem =======Start GPS NEO7 INI CODE (Rate 5Hz and only $GPRMC)=========== Sub ININEO 'CFG-MSG - 06 01 08 00 F0 00 01 00 01 01 01 01 - OFF 'CFG-MSG - 06 01 08 00 F0 01 01 00 01 01 01 01 - OFF 'CFG-MSG - 06 01 08 00 F0 02 01 00 01 01 01 01 - OFF 'CFG-MSG - 06 01 08 00 F0 03 01 00 01 01 01 01 - OFF 'CFG-MSG - 06 01 08 00 F0 04 01 01 01 01 01 01 - $GPRMC -ON 'CFG-MSG - 06 01 08 00 F0 05 01 00 01 01 01 01 - OFF 'CFG-RATE - 06 08 06 00 C8 00 01 00 01 00 - 5 Hz Data &hB5,&h62,&h06,&h01,&h08,&h00,&hF0,&h00,&h01,&h00,&h01,&h01,&h01,&h01 nck = 14: HEXSUM Data &hB5,&h62,&h06,&h01,&h08,&h00,&hF0,&h01,&h01,&h00,&h01,&h01,&h01,&h01 nck = 14: HEXSUM Data &hB5,&h62,&h06,&h01,&h08,&h00,&hF0,&h02,&h01,&h00,&h01,&h01,&h01,&h01 nck = 14: HEXSUM Data &hB5,&h62,&h06,&h01,&h08,&h00,&hF0,&h03,&h01,&h00,&h01,&h01,&h01,&h01 nck = 14: HEXSUM Data &hB5,&h62,&h06,&h01,&h08,&h00,&hF0,&h04,&h01,&h01,&h01,&h01,&h01,&h01 nck = 14: HEXSUM Data &hB5,&h62,&h06,&h01,&h08,&h00,&hF0,&h05,&h01,&h00,&h01,&h01,&h01,&h01 nck = 14: HEXSUM Data &hB5,&h62,&h06,&h08,&h06,&h00,&hC8,&h00,&h01,&h00,&h01,&h00 nck = 12: HEXSUM End Sub Sub HEXSUM For i=1 To nck Read xch(i): Print Hex$(xch(i));Space$(1); Next i Rem *** Fletcher checksumm *** CK_A = 0 CK_B = 0 For i=3 To nck CK_A = (CK_A + xch(i)) And 255 CK_B = (CK_B + CK_A) And 255 Next i Print "CK_A=";Hex$(CK_A),"CK_B=";Hex$(CK_B) For i=1 To nck Print #5,Chr$(xch(i)); Next i Print #5,Chr$(CK_A)+Chr$(CK_B); End Sub
Сообщение отредактировал Aleksk: 26 марта 2018 - 01:07
#229
Moder
-
- Администратор
-
- 2 212 сообщений
Яхтенный капитан
- Из:Москва
-
Судно: 34 фута
-
Название: Ирида
Отправлено 26 марта 2018 - 01:00
Потроха модуля , судя про скриншоту, представляют собой u-blox7.
Да, там стоит ublox max-7c-0-000.
А то, что там 10Гц написано в описании -- это то, что от него возможно 10 герц получить, но, на самом деле, по умолчанию там 1 Гц идет? Вообще попробую его осциллографом посмотреть завтра.
Ну и на нем стоит батарейка, вроде как где-то в описании попадалось, что она для ускорения старта. Вообще, не нашел нормальгного описания. То есть там есть выходы TXD и RXD, но, кроме них, еще SDA2 и SCL2. Это что, у него там еще и i2c на борту, что ли?
#230
Aleksk
-
- Капитан
-
- 13 763 сообщений
Яхтенный капитан
- Из:Ленинград
-
Судно: ⛵
-
Название: Неспешный
Отправлено 26 марта 2018 - 01:13
Да, там стоит ublox max-7c-0-000.
А то, что там 10Гц написано в описании -- это то, что от него возможно 10 герц получить, но, на самом деле, по умолчанию там 1 Гц идет? Вообще попробую его осциллографом посмотреть завтра.
Ну и на нем стоит батарейка, вроде как где-то в описании попадалось, что она для ускорения старта. Вообще, не нашел нормальгного описания. То есть там есть выходы TXD и RXD, но, кроме них, еще SDA2 и SCL2. Это что, у него там еще и i2c на борту, что ли?
вверху я дополнил ссылкой на описание. Но есть гораздо более толстая документация от производителя U-Blox модулей она есть на его сайте.
По умолчанию 1 Гц. Скорость 9600.
Кроме UART он может общаться по проприетарному бинарному протоколу. Это конечно же удобнее и быстрее, т.к. парсить не надо строки. Но мне это не надо.
В принципе модули нормальные. Но надо иметь в виду, что иногда они гонят пургу (лишние символы или пропуски), и надо предусмотреть программный фильтр от такой лажи. Из интернета я понял, что это не только у этих модулей.
Сообщение отредактировал Aleksk: 26 марта 2018 - 01:17
#231
Moder
-
- Администратор
-
- 2 212 сообщений
Яхтенный капитан
- Из:Москва
-
Судно: 34 фута
-
Название: Ирида
Отправлено 26 марта 2018 - 02:36
В принципе модули нормальные. Но надо иметь в виду, что иногда они гонят пургу (лишние символы или пропуски), и надо предусмотреть программный фильтр от такой лажи. Из интернета я понял, что это не только у этих модулей.
На сколько я понял, библиотека TinyGPS убирает эту пургу.
За документацию спасибо. Изучаю.
#232
Moder
-
- Администратор
-
- 2 212 сообщений
Яхтенный капитан
- Из:Москва
-
Судно: 34 фута
-
Название: Ирида
Отправлено 26 марта 2018 - 11:09
Aleksk, а к чему Вы подключали этот модуль? Просто смотрю, в документации описано, что на выходах 3.3 вольта, а на ардуино 5. Можно напрямую подключать, или таки делитель надо?
#233
Aleksk
-
- Капитан
-
- 13 763 сообщений
Яхтенный капитан
- Из:Ленинград
-
Судно: ⛵
-
Название: Неспешный
Отправлено 26 марта 2018 - 13:57
Aleksk, а к чему Вы подключали этот модуль? Просто смотрю, в документации описано, что на выходах 3.3 вольта, а на ардуино 5. Можно напрямую подключать, или таки делитель надо?
Arduino это IDE. Много контроллеров которые она поддерживает на 3.3 вольта. (у меня в автопилоте Duinomite, это зверек из другого зоопарка на 3.3 вольта ) .
Пятивольтовые это совсем древние и медленные восьмибитные типа ATmega328P.
К ним надо левелшифтер - преобразователь уровней 5в -3.3в. Цена платки 30 руб..
http://roboshop.spb....level-converter
Сообщение отредактировал Aleksk: 26 марта 2018 - 13:59
#234
Moder
-
- Администратор
-
- 2 212 сообщений
Яхтенный капитан
- Из:Москва
-
Судно: 34 фута
-
Название: Ирида
Отправлено 26 марта 2018 - 15:53
Ну due у меня есть, но чего-то подклюкивала она. можно, конечно, ее еще разок пощупать. Я думал на ардуино мега (это на ATmega2560) делать. Все самодельные автопилоты, которые находил, на ней сделаны. Какие-то левел шифтеры у меня были, надо покопаться в закромах.
#235
В. Мельников
-

- Капитан
-
- 7 226 сообщений
Яхтенный капитан
- Из:Toronto
-
Судно: Lagoon 380
-
Название: Ariadna
Отправлено 26 марта 2018 - 16:29
На Sailing Anarchy продаются такие штучки - может они могут быть использованы для изготовления автопилота?

https://sailinganarc...how-ad/?id=3476
Сообщение отредактировал В. Мельников: 26 марта 2018 - 16:30
#236
Aleksk
-
- Капитан
-
- 13 763 сообщений
Яхтенный капитан
- Из:Ленинград
-
Судно: ⛵
-
Название: Неспешный
Отправлено 26 марта 2018 - 18:29
На Sailing Anarchy продаются такие штучки - может они могут быть использованы для изготовления автопилота?
непонятно, как этот магнитометр калибровать на реальном судне , где обязательно есть железки.
https://www.maretron...0 Datasheet.pdf
#237
В. Мельников
-
- Капитан
-
- 7 226 сообщений
Яхтенный капитан
- Из:Toronto
-
Судно: Lagoon 380
-
Название: Ariadna
Отправлено 26 марта 2018 - 18:43
непонятно, как этот магнитометр калибровать на реальном судне , где обязательно есть железки.
А это точно магнитометр? Из приложенного вами я вычитал что это гирокомпас
#238
Aleksk
-
- Капитан
-
- 13 763 сообщений
Яхтенный капитан
- Из:Ленинград
-
Судно: ⛵
-
Название: Неспешный
Отправлено 26 марта 2018 - 19:30
А это точно магнитометр? Из приложенного вами я вычитал что это гирокомпас
Я же документацию производителя приложил выше. Обычные МЕМС трехосевые датчики : акселерометр, магнитометр и гироскоп. Сигналы с них скорее всего проходят через фильтр Маджвика. Таких конструкций наклонно компенсированных компасов достаточно гуляет в сети.
Сообщение отредактировал Aleksk: 26 марта 2018 - 19:35
#239
Aleksk
-
- Капитан
-
- 13 763 сообщений
Яхтенный капитан
- Из:Ленинград
-
Судно: ⛵
-
Название: Неспешный
Отправлено 26 марта 2018 - 19:58
Ну due у меня есть, но чего-то подклюкивала она. можно, конечно, ее еще разок пощупать. Я думал на ардуино мега (это на ATmega2560) делать. Все самодельные автопилоты, которые находил, на ней сделаны. Какие-то левел шифтеры у меня были, надо покопаться в закромах.
В чем выражались глюки?
Меги для home made автопилота вполне хватит. Хотя перспективнее переходить на STM32, т.к. они превосходят DUE по всем параметрам и тоже поддерживаются Ардуино IDE (и другими более взрослыми IDE тем более).
#240
В. Мельников
-
- Капитан
-
- 7 226 сообщений
Яхтенный капитан
- Из:Toronto
-
Судно: Lagoon 380
-
Название: Ariadna
Отправлено 26 марта 2018 - 20:01
Я же документацию производителя приложил выше. Обычные МЕМС трехосевые датчики : акселерометр, магнитометр и гироскоп. Сигналы с них скорее всего проходят через фильтр Маджвика. Таких конструкций наклонно компенсированных компасов достаточно гуляет в сети.
Я ее и читаю:
"
Maretron’s SSC300, implementing the second generation of
Maretron’s award-winning solid state compass technology, is a
solid state, rate gyro electronic compass that provides better than
0.7° heading accuracy through ±45° of roll and pitch angle, and
better than 1° roll and pitch accuracy in static conditions. Each
SSC300 is factory calibrated for maximum accuracy. It delivers
precise, reliable heading and rate of turn information ten times per
second, and vessel attitude including pitch and roll readings once
per second. A micromachined 3-axis rate gyro is used in conjunction
with the 3-axis accelerometer by advanced stabilization algorithms
to provide accurate, stable readings during dynamically changing
conditions such as hard turns or rough seas, making it an ideal
heading sensor for autopilot or radar overlay applications.
"
Может мои знания устарели но меня учили что гироскоп применяется в гирокомпасе если нужно знать направление. Как же мне трактовать в свете последних учений если мы хотим знать направление и применяем гироскоп? Это уже НЕ гирокомпас а что-то другое?
#241
Moder
-
- Администратор
-
- 2 212 сообщений
Яхтенный капитан
- Из:Москва
-
Судно: 34 фута
-
Название: Ирида
Отправлено 26 марта 2018 - 20:09
В чем выражались глюки?
Меги для home made автопилота вполне хватит. Хотя перспективнее переходить на STM32, т.к. они превосходят DUE по всем параметрам и тоже поддерживаются Ардуино IDE (и другими более взрослыми IDE тем более).
Не due, ошибся я, а duo. Чего-то перестали скетчи заливаться, мог, в принципе, пожечь. Но переходить на 3.3 вольта не хочется, ибо все остальные платы, которые собираюсь применять, на 5 вольт. Релюхи, дистанционное управление, экран...
#242
Aleksk
-
- Капитан
-
- 13 763 сообщений
Яхтенный капитан
- Из:Ленинград
-
Судно: ⛵
-
Название: Неспешный
Отправлено 26 марта 2018 - 20:23
Я ее и читаю:
"
Maretron’s SSC300, implementing the second generation of
Maretron’s award-winning solid state compass technology, is a
solid state, rate gyro electronic compass that provides better than
0.7° heading accuracy through ±45° of roll and pitch angle, and
better than 1° roll and pitch accuracy in static conditions. Each
SSC300 is factory calibrated for maximum accuracy. It delivers
precise, reliable heading and rate of turn information ten times per
second, and vessel attitude including pitch and roll readings once
per second. A micromachined 3-axis rate gyro is used in conjunction
with the 3-axis accelerometer by advanced stabilization algorithms
to provide accurate, stable readings during dynamically changing
conditions such as hard turns or rough seas, making it an ideal
heading sensor for autopilot or radar overlay applications.
"
Может мои знания устарели но меня учили что гироскоп применяется в гирокомпасе если нужно знать направление. Как же мне трактовать в свете последних учений если мы хотим знать направление и применяем гироскоп? Это уже НЕ гирокомпас а что-то другое?
Это не гирокомпас в привычном понимании. Более того гиродатчик там вспомогательная деталь к магнитометру, и служит для ускорения реакции.
Микромеханические гироскопы - обширный класс. Можете почитать тут - http://www.mdpi.com/...0/14/1/1394/htm
Дрейф у них чудовищный, поэтому в чистом виде их нельзя использовать для лодок. У гироскопов с маленьким дрейфом цены космические и размер побольше будет.
Сообщение отредактировал Aleksk: 26 марта 2018 - 20:24
#243
Moder
-
- Администратор
-
- 2 212 сообщений
Яхтенный капитан
- Из:Москва
-
Судно: 34 фута
-
Название: Ирида
Отправлено 29 марта 2018 - 18:38
Тут начал собирать схему с актуатором и двумя релюхами, получается третью релюху надо, дабы отрубала питание на актуатор, когда с ним ничего не делаем, или есть более продвинутые методы?
#246
Aleksk
-
- Капитан
-
- 13 763 сообщений
Яхтенный капитан
- Из:Ленинград
-
Судно: ⛵
-
Название: Неспешный
Отправлено 29 марта 2018 - 20:22
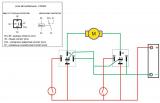
Тут начал собирать схему с актуатором и двумя релюхами, получается третью релюху надо, дабы отрубала питание на актуатор, когда с ним ничего не делаем, или есть более продвинутые методы?
Управляйте правильно. В момент стопа , например вот так -
P.S. Но лучше вообще отказаться от реле в силовой части схемы.
Сообщение отредактировал Aleksk: 29 марта 2018 - 20:25
#248
Aleksk
-
- Капитан
-
- 13 763 сообщений
Яхтенный капитан
- Из:Ленинград
-
Судно: ⛵
-
Название: Неспешный
Отправлено 29 марта 2018 - 20:33
А что использовать тогда?
Интегральный мост на полевых транзисторах, я писал о нем тут http://forum.katera....kami/?p=2133071
Микросхема отличная, много кто ее пользует http://arduinolab.pw...telya-vnh2sp30/
Сообщение отредактировал Aleksk: 29 марта 2018 - 20:46
#250
Лотос
-

- Капитан
-
- 2 480 сообщений
Яхтенный капитан
- Из:Астрахань
Отправлено 29 марта 2018 - 20:58
Интегральный мост на полевых транзисторах, я писал о нем тут http://forum.katera....kami/?p=2133071
Микросхема отличная, много кто ее пользует http://arduinolab.pw...telya-vnh2sp30/
Пишут,что разное напряжение при реверсе.
Ответить









Количество пользователей, читающих эту тему: 0
0 пользователей, 0 гостей, 0 скрытых пользователей

