



Да я вообще н уверен, нужен ли этот датчик положения. Вообще тот, что Вы указали -- доставка там дорогая, есть подешевле варианты. Вот, к примеру https://ru.aliexpres...8851bd5a9&tpp=1
Но я вот посмотрел, что за рубь ежом делают -- используют они простейшие актуаторы. Например https://github.com/K.../boat_autopilot . И я так и не понял пока, как мне на ардуинке потенциометр сэмулировать.
Я просто указал на тип с резистором хоть я и против скользящих контактов в датчике положения.
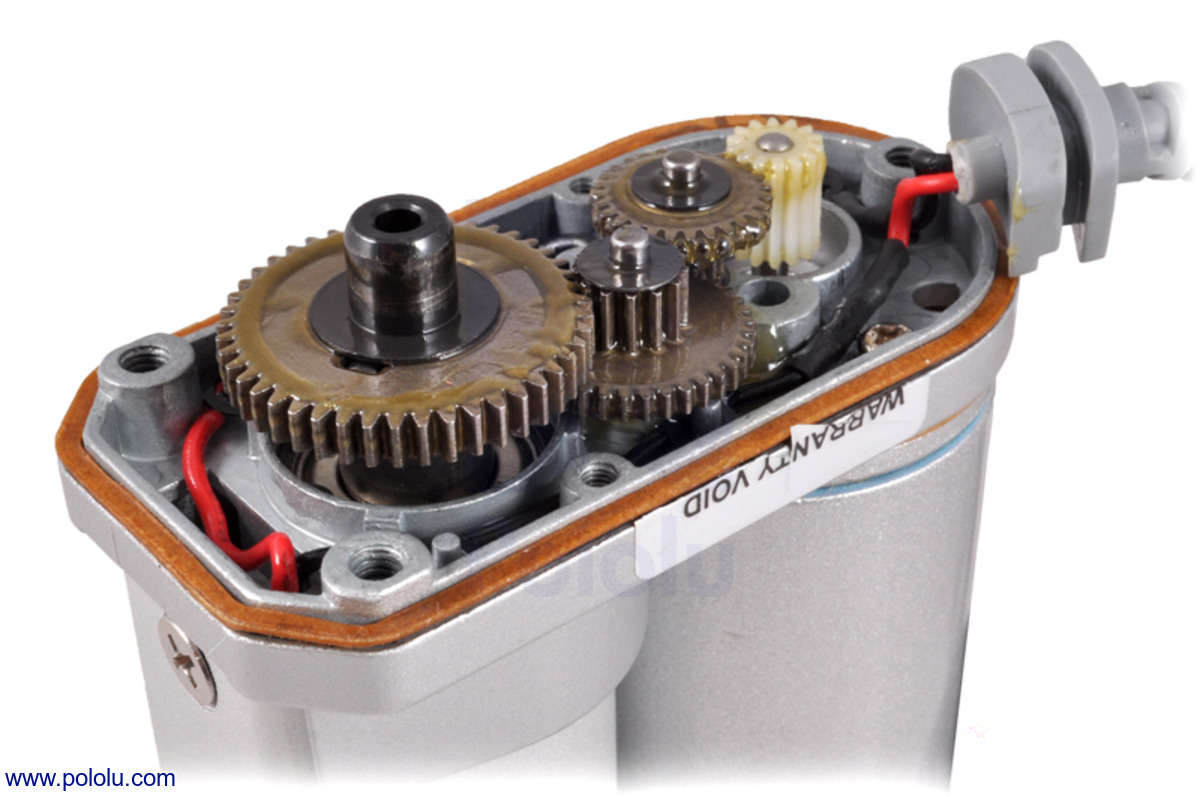
Вообще у подобных актуаторов ток холостого хода около 1.5 ампер (кстати, вначале я думал использовать шуруповерт, а там та же беда с большим током холостого хода). А надо выбирать мощный актуатор, т.к. постоянно работать под нагрузкой слабый не сможет из-за перегрева, т.к. рабочий цикл 20% от времени работы (это понятно, ведь расчёт был на то , что надо мощно открыть ворота раз в день или опрокинуть лоток в инкубаторе). Под нагрузкой добавятся потери на скольжение по червячной передаче. Еще эти актуаторы разные по внутренностям, кое где понапихано дешевой пластмассы в виде шестеренок и прочего. Есть продавцы которые показывают внутреннее устройство, например, редуктор на металлических шестеренках. А рядом фото конкурента с дешевой пластмассой.
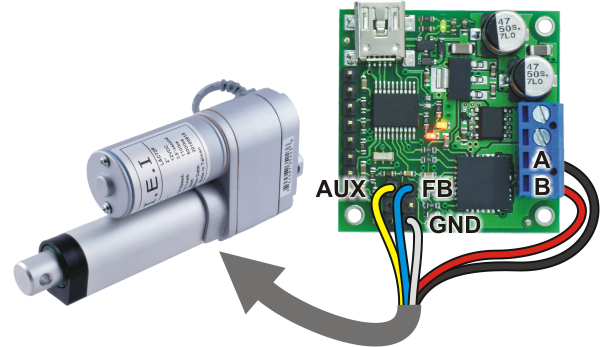
По ссылке не законченный проект автопилота. В нем автор в качестве датчика положения руля использует инкрементальный энкодер от механической мышки. А зачем вам эмулировать потенциометр я не совсем понял, когда за 250 руб можно взять MassDuino родственника UNO с двухканальным ЦАП (или отдельный ЦАП с шиной i2c)? Эмулировать потенциометр из линейного актуатора? Для этого и придуманы бесконтактные энкодеры.
Сообщение отредактировал Aleksk: 21 февраля 2018 - 22:46





 ).
).









