Пишут,что разное напряжение при реверсе.
тогда бы микросхема у меня нагревалась, а она холодная при токе 500 мА. Может быть им брак попался, или включили её неправильно.
Сообщение отредактировал Aleksk: 29 марта 2018 - 21:06



Яхтенный капитан

Отправлено 29 марта 2018 - 21:03
Пишут,что разное напряжение при реверсе.
тогда бы микросхема у меня нагревалась, а она холодная при токе 500 мА. Может быть им брак попался, или включили её неправильно.
Сообщение отредактировал Aleksk: 29 марта 2018 - 21:06
Яхтенный капитан
Отправлено 29 марта 2018 - 21:18
Пишут на выходе- (в коментах,)
падение напряжения на чем происходит как не на транзисторах моста? Дали бы уже ссылку на комменты, чтобы почитать.
Эта микросхема у меня скоро третий сезон будет работать в автопилоте. Пробовал биполярный мост L298N, сильно греется, очень не понравился.
Сообщение отредактировал Aleksk: 29 марта 2018 - 21:22
Яхтенный капитан
Отправлено 29 марта 2018 - 21:34
Так они под видео,что Вы дали...
не известна схема по которой они включали, что за нагрузка, ток, напряжение питания, подали ли именно +5 В на внутреннюю логику управления, чем и как измеряли. Как нибудь измерю падение на своей.
Яхтенный капитан

Отправлено 29 марта 2018 - 23:00
Еще бы обратные диоды добавить....
а куда диоды? Вообще в сомнениях теперь, как делать. Релюхи-то у меня уже есть, платку заказал на всякий случай, но пока дойдет... А чем эта плата лучше релюх?
Яхтенный капитан
Отправлено 30 марта 2018 - 00:08
а куда диоды? Вообще в сомнениях теперь, как делать. Релюхи-то у меня уже есть, платку заказал на всякий случай, но пока дойдет... А чем эта плата лучше релюх?
Реле подводят полное напряжение, от этого резкий старт мотора, повышенные пусковые токи, а если надо чуть чуть повернуть руль?
Для этого ведь не нужно полное напряжение подавать, достаточно пониженного, тогда моторчик будет мало потреблять при малых отклонениях от курса.
Можно поставить перед мостом из реле, импульсный понижающий преобразователь и подавать на него ШИМ модуляцию в зависимости от режима, а можно подавать ШИМ на готовый интегральный мост на полевиках.
Реле изнашиваются, транзисторы - нет.
Реле выдают больше электромагнитных помех, а это вопрос надежности работы системы управления.
Яхтенный капитан
Отправлено 30 марта 2018 - 00:23
Совершенно верно. Без диодов, реле долго не проживут. Плюс дикие помехи от дуги при разрыве индуктивной нагрузки. Все нормальные мостовые схемы на ключах (реле или транзисторы) содержат диоды для рекуперации энергии индуктивности в источник питания (как правило) , а не во вредную дугу.
Яхтенный капитан
Отправлено 30 марта 2018 - 15:23
не известна схема по которой они включали, что за нагрузка, ток, напряжение питания, подали ли именно +5 В на внутреннюю логику управления, чем и как измеряли. Как нибудь измерю падение на своей.
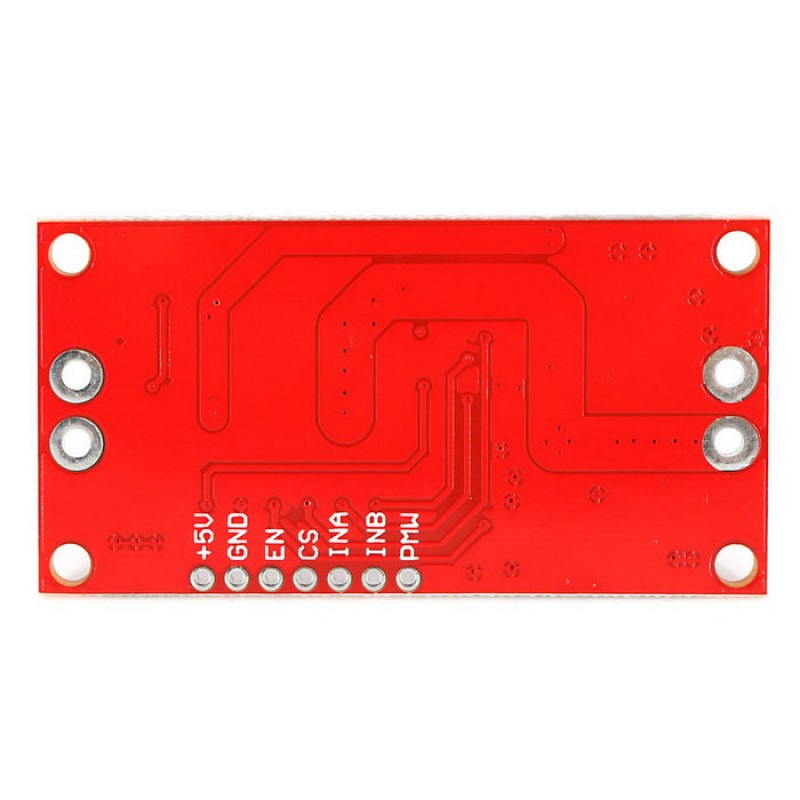
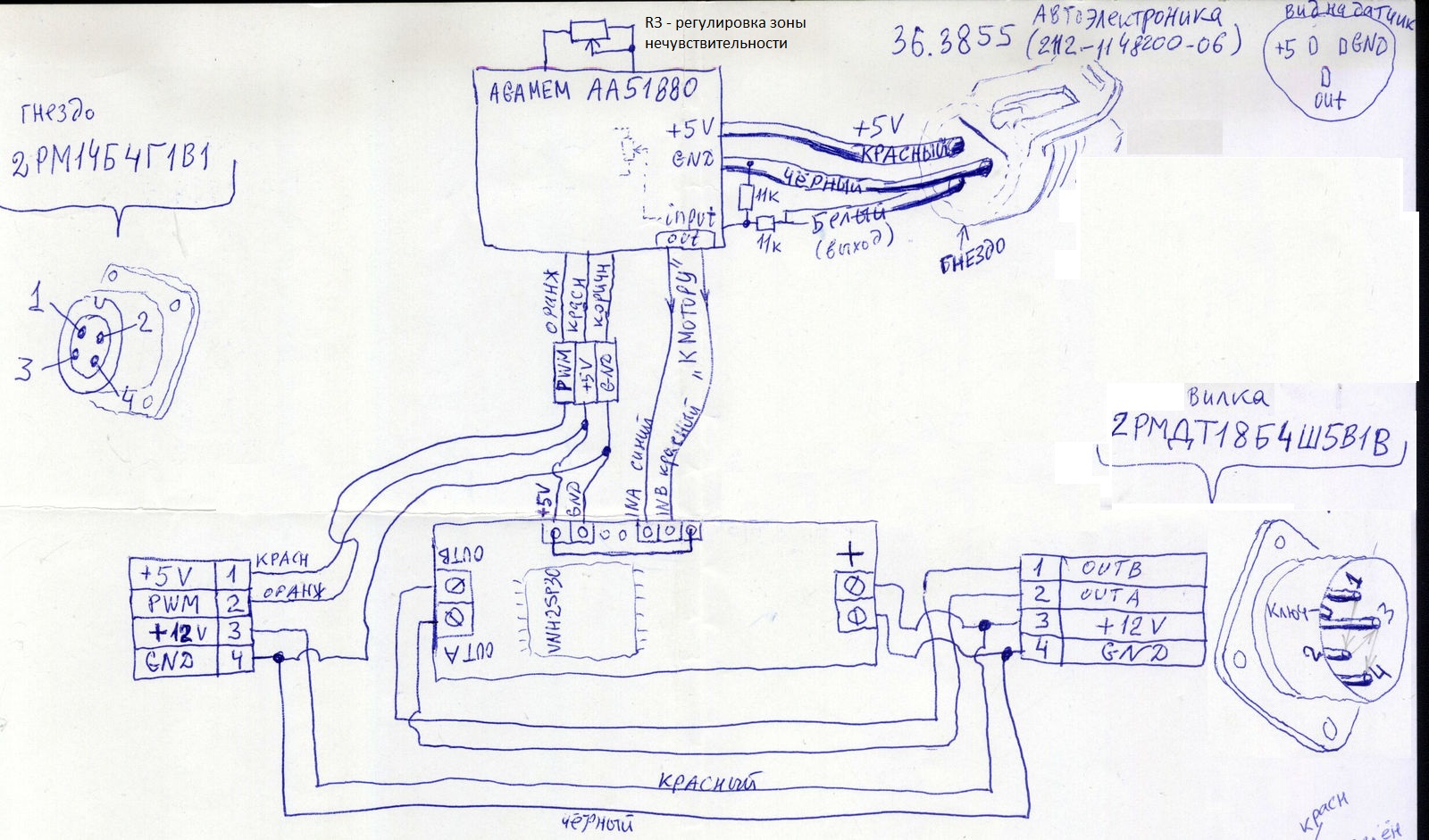
Взял новую платку с микросхемой моста VNH2SP30 и проверил падение напряжения на внутренних полевых транзисторах. Питание брал от двух источников на 12 В (для силы) и 5 вольт (низковольтный нужен для подтяжки входов управления платы). Вход PWM как обычно соединил с входом +5 В. Входы EN и CS болтаются в воздухе. Входы InА и InВ посадил на землю , при этом на выходе платы ничего нет. Переключал входы от земли на +5 В , то один то другой, чтобы получить прямое либо инверсное напряжение на нагрузке.
При входном напряжении на клеммах платы 11.95 В и резистивной нагрузке около 9.5 Ом, ток от источника питания составил 1.29 А, а напряжение на выходе платы (куда подключена нагрузка) составило 11.87 В (при подаче +5 В на вход А), и -11.87 В (подаче +5 В на вход В). Абсолютная симметрия по модулю, микросхема исправна. 
Имеем суммарное падение напряжения на микросхеме 0.08 В. Учитывая ток 1.29 А
получаем сопротивление полевиков 62 мОм, а их там три последовательно (включая защитный от переполюсовки).
Итого 20 мОм на каждый полевой транзистор. Что укладывается в паспортные данные. https://www.elecrow....0 Datasheet.pdf
Пишу , а микросхема стоит на токе 1,3 А уже полчаса. Холодная.
На 9 вольтах питания тоже проверял, там падение уменьшается и также сохраняется симметрия выходного напряжения по модулю.
Сообщение отредактировал Aleksk: 30 марта 2018 - 16:17
Яхтенный капитан
Отправлено 30 марта 2018 - 15:49
а какие диоды тут подойдут?
для реле подойдут любые на ток 1 А и выше и напряжение от 25 В и выше, даже низкочастотные выпрямительные. Можно мостик взять из любого блока питания, там как раз четыре диода и соединены как надо (поюс (+) мостика на плюс питания, минус (-) мостика на минус питания, в диагональ (между значками (~ ~) ) включаем двигатель, и средние контакты реле).
Яхтенный капитан
Отправлено 30 марта 2018 - 16:01
У меня реле на управление мотором от шуруповерта,три года нормально работало ДУ кнопками.
Для меня так проще,для электроники знания отсутствуют.
по моим подсчетам на двигатель уже подавалось напряжение порядка 400 тысяч раз, а сколько вы раз нажали на кнопку ?
Дело в том, что автопилот примерно раз в секунду по чуть чуть прокручивает движок, за более чем 100 часов испытаний набегает много.
Можно (желательно) реже сделать переключения, тогда точность ведения по траектории ухудшится.
Пока не было интегральной составляющей в регуляторе медленного контура (программный регулятор) , движок заметно реже крутился.
Сообщение отредактировал Aleksk: 30 марта 2018 - 16:03
Яхтенный капитан
Отправлено 08 июня 2018 - 22:16
Приобрел этот VNH2SP30 -- что-то не запускается он у меня. Скетч писал на основе этого: http://arduinolab.pw...telya-vnh2sp30/
Яхтенный капитан
Отправлено 09 июня 2018 - 12:30
Приобрел этот VNH2SP30 -- что-то не запускается он у меня. Скетч писал на основе этого: http://arduinolab.pw...telya-vnh2sp30/
Для окончательной проверки подключите просто проводками совсем по простому (у меня так работали две платы от разных продавцов).
+5 В === к источнику питания +5 В
GND === к источнику питания GND
EN === болтаются в воздухе.
CS === болтаются в воздухе.
InА === +5 В через резистор 470...2000 Ом (или GND для реверса мотора)
InВ === GND через резистор 470...2000 Ом (или +5В для реверса мотора)
PWM === +5 В
Не забыть подключить источник на 12 В на вход , и нагрузку хотя бы 50 ...100 Ом на выход драйвера .
чужой
Отправлено 02 июля 2018 - 11:44
Дошли руки до АП. Оказалось, что на открытом коллекторе тр-ра управления оптопарой привода стояла с 14 года перемычка для отладки. (-: Сумел я его (АЛ), с помощью "веревочной петли и палки" запустить и испытать (правда в идеальных условиях, полный штиль, ни морщинки на воде). 1.Ведет (проверялось по "дорожке" Гармин 2+) 30 мин. (скорость 13 км/час) без всяких отклонений (отдельно проверялась ОС по электронному компасу и внутреннему приемнику ГПС, с компасом немного "колбасит" штурвал). 2.Полностью послушен как внутреннему фиксатору заданного курса, так и управлению от ПК с помощью Ози - была проверка с изменением курса на 10 град. и 180. Режим Ози - идти на точку. Но ток жрет - порядка 7-10А в среднем (24 В). Но это уж особенность привода. Правда, у ДПТ есть патрубки для обдува, но это не сейчас. Была грубая отладкой коэффициентов ПИД регулятора - до приемлемого состояния. 3. Работает и ручное управление с помощью переменного резистора - без привычки неудобно.
Яхтенный капитан
Отправлено 02 июля 2018 - 20:46
Физ пуск это хорошо. В первом режиме (ведение по азимуту) с какой частотой работал GPS ?
Во втором режиме (ведение на точку), как я понял Озик (как это умеет OpenCPN) взял на себя расчет геодезии и выдал на COM-порт строку с данными в том числе пеленга и расстояния до путевой точки (сообщение -BWC) непосредственно для регулятора автопилота. В этом режиме у GPS какая частота установлена?
С резистором я быстро завязал, когда попробовал управлять в канале. Неудобно, он должен быть ровно на 360 градусов и без упора (в принципе можно извратится и использовать многооборотный, но лучше уж тогда энкодер). Оставил ввод цифр с пульта (ну и вращение головы компаса в качестве пропорционального управления, аки штурвал).
чужой
Отправлено 02 июля 2018 - 21:26
Внутренний ГПС - 5 Гц (как и компас, и ПИД регуляторы), для Ози - 1 Гц (он посылает с частотой ГПСмышки компьютера, те можно и меньше, и больше, кстати, вместо Ози можно подключить GPS III+ c записанными в него маршрутами, не порбовал еще). В каждой посылке от Ози новое задание курса для работы контуров или внутреннего ГПС, или компаса. Внутренний ГПС имеет приоритет перед компасом, но есть возможность принудительного перехода на компас. Эти контура снабжены ПИД регулятором. Его выход подключен ко входу ПИД регулятора положения руля. Он регулирует относительно центрального положения руля и неплохо отлажен у причала. Можно подключить режим компенсации ухода с курса,Cross Track error из RMB (попробую в следующей раз). Есть мысль на отдельном МК ( дешевый STM 32) сделать более быстродействующей контур положения руля.
Раз заработал - составлю модель в Матлабе Симулинк и побалуюсь.
Яхтенный капитан
Отправлено 03 июля 2018 - 01:08
Спасибо, я примерно так и представлял.
===================================================
Кстати неделю назад (когда я был в лодке), американская GPS пропадала несколько раз на время от 5 до 15 минут. Причем пропадала она синхронно на приемниках Ublox Neo-7 и GarminLegend, но в более новом чипе в смартфоне, трек продолжал писаться, а спутники, как американские так и российские, все были отлично видны. Хорошо автопилот был не на квадрокоптере в автономном режиме. 
(это заставляет задуматься про правильный выбор приёмника).
Еще пока не понятно, есть ли модули GPS (Глонасс) которые честно выдают в строке RMC магнитное склонение, т.е. в которые зашита формула вычисления ( как это происходит в готовых навигаторах, т.к. они в этой строке честно пишут магнитное склонение, даже древний GarminLegend).
Сообщение отредактировал Aleksk: 03 июля 2018 - 02:04
Рулевой 1-го класса


Отправлено 03 июля 2018 - 18:02
Полагаю, что магн.склонение вычисляется (м.б. иногда) не в модуле ГНСС, а в курсоуказателе или навигационном ПО.
Несколько раз при установке TZPro с подключенным не магн., а гирокомпасом (и ГНСС конечно) оно показывало магн. курс. К сожалению, на поступающие сентенции внимания не обращал. Просто в опциях TZPro менял с Магнитного на Истинный параметр Отображать пеленг и курс приходил в соответствие с компасным.
чужой
Отправлено 03 июля 2018 - 20:23
Побаловался с Симулинкм -надо увеличить Д у ПИД регулятора, а так почти попал, с учетом погрешностей модели.
Вот фотки автопилота и цепь и звездочка исполнительного у-ва.







чужой
Отправлено 03 июля 2018 - 21:01
Видна антенна и плата внутреннего ГПС, сама ТИВА-С, плата гироскопа-типа JY-901 - проверена, подключена, но еще не использована. Виден отладочный шнурок, разъемы для компаса, GPS III+, USB разъем для Ози, разъем управления приводом, ОС по положению штуртроса. Виден резистор управления и тумблеры управления и включения привода.









0 пользователей, 0 гостей, 0 скрытых пользователей

Система для сообществ IP.Board
Лицензия зарегистрирована на: Журнал "КАТЕРА и ЯХТЫ"


{kind=link}