
...
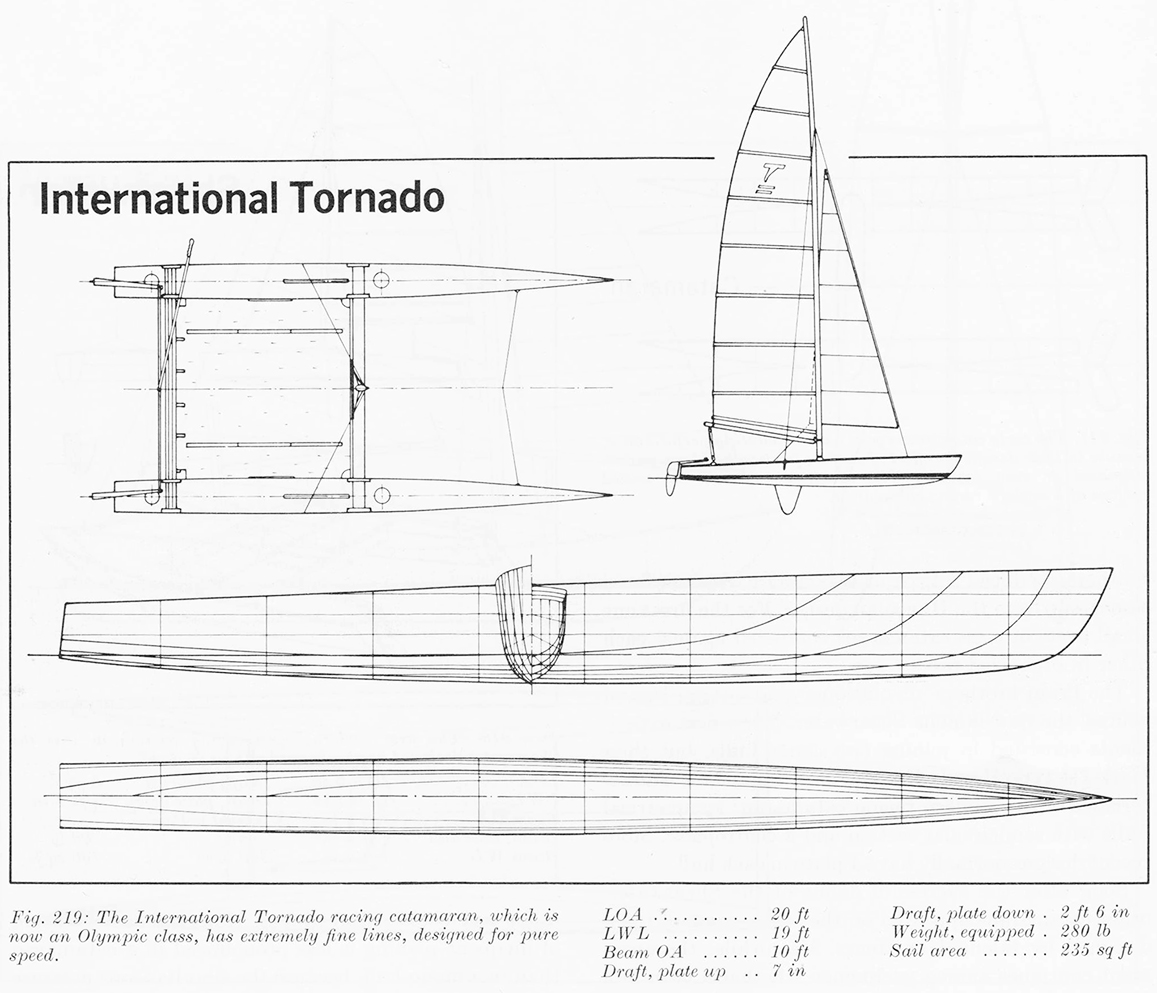
покажите гоночный кат с симметричными корпусами
...




Рулевой 1-го класса


Отправлено 13 сентября 2019 - 21:01
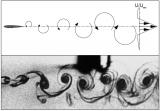
Посмотрите на направление барашков на среднем снимке.
так то ж Дракон, он медленный и остро к ветру стоит
Фанерные торнады симметричными были очень давно!
Сообщение отредактировал varsdf: 13 сентября 2019 - 21:02
Za RUDDI u SKR

Отправлено 13 сентября 2019 - 23:49
Если не считать за другие места Японию, Китай, ЮВА. Там это стандартный способ гребли.
Случайно посмотрел фильм про шашни англичан и португальцев в Японии. Там в очень свежий ветер джонка с гребцами по бортам идёт довольно уверенно против ветра, а длинные вёсла чуть наклонены к корме вдоль борта и "голанят"!!!!! Обычно принято считать, что длинные вёсла ЗАНОСЯТ поперёк ДП. Не ошибка ли этих историков флота? Триремы, диремы. Что, эти рабы были способны заносить длиннейшие вёсла, чтобы гребануть разок? На рисунках везде вёсла наклонены к корме.
Юнга
Отправлено 14 сентября 2019 - 23:58
Там другие дела.
Что общего между плавниковым движителем (или веслом для гребли по голлански)
и фото

со странички: https://ru.wikipedia...ихревая_дорожка
За любой неподвижной преградой в потоке образуется вихревая дорожка -
поэтому как-то получается сопротивление,

за движущимся (поперек потока) крылом тоже образуется вихревая дорожка,
только с обратным вращением вихрей -
и как-то получается тяга.
Хотя может быть, все проще:
"Галанят одним веслом, укрепленным на корме шлюпки.
При этом движение весла преобразуется в упор.
Сторона лопасти весла, обращенная к носу шлюпки, — засасывающая, создающая разрежение.
Противоположная сторона лопасти — нагнетающая, создающая давление."
Сообщение отредактировал Victor R: 15 сентября 2019 - 00:10
Яхтенный капитан

Отправлено 15 сентября 2019 - 00:15
1. За любой неподвижной преградой в потоке образуется вихревая дорожка - поэтому как-то получается сопротивление
2. за движущимся (поперек потока) крылом тоже образуется вихревая дорожка, только с обратным вращением вихрей - и как-то получается тяга.
3. Хотя может быть, все проще:
"Галанят одним веслом, укрепленным на корме шлюпки.
При этом движение весла преобразуется в упор.
Сторона лопасти весла, обращенная к носу шлюпки, — засасывающая, создающая разрежение.
Противоположная сторона лопасти — нагнетающая, создающая давление."
1. Слово "любой" здесь неуместно. За хорошо обтекаемым телом (профиль крыла) не образуется дорожки Кармана. За ним будет вихревой след, а это совсем другое физическое явление.
2. Тяга или сопротивление не зависит от направления вращения вихрей. Пример - пластинка под углом атаки, совершающая вертикальные колебания. Угол атаки сменим на отрицательный, направление вихрей изменится, а смены знака горизонтальной составляющей не произойдет.
3. А вот это - верно. Плюс добавляется составляющая, вызванная вращением весла относительно вертикальной оси на транце. Как в 56 сообщении.
Яхтенный капитан
Отправлено 15 сентября 2019 - 01:04
в общем галанку кроет по всем параметрам акваскиппер
А есть данные о рекорде продолжительности прыганья на акваскиппере?
Боюсь, азиатских работяг они не порадуют. 
Да и сыро стартовать, ехать и останавливаться.
Не, такой футбол способ нам не нужен. 
Яхтенный капитан

Отправлено 15 сентября 2019 - 01:42
увы рекордов нет
неоптимизирована кинематика
очень на энергозатратно
самых сильных хватало на несколько минут
если сочетать крыло скиппера с джонками азиатов
возможно результат бы их и порадовал
Юнга
Отправлено 15 сентября 2019 - 13:30
1. Слово "любой" здесь неуместно. За хорошо обтекаемым телом (профиль крыла) не образуется дорожки Кармана. За ним будет вихревой след, а это совсем другое физическое явление.
2. Тяга или сопротивление не зависит от направления вращения вихрей. Пример - пластинка под углом атаки, совершающая вертикальные колебания. Угол атаки сменим на отрицательный, направление вихрей изменится, а смены знака горизонтальной составляющей не произойдет.
3. А вот это - верно. Плюс добавляется составляющая, вызванная вращением весла относительно вертикальной оси на транце. Как в 56 сообщении.
1.Дорожка Кармана - это и есть вихревой след, принимающий такой вид при некоторых условиях, например при определенной скорости потока:

2.Вы такое движение пластинки (крыла) имели ввиду?

для такого движения вихревой след в виде обратной дорожки Кармана:

Юнга
Отправлено 15 сентября 2019 - 13:47
в общем галанку кроет по всем параметрам акваскиппер
несущее крыло одно
амплитуда оптимальна
скорость до 20 км в час
Акваскипер использует преимущество крыла большого удлинения, чем оно выше, как вы знаете,
тем больше качество, т.е. отношение силы тяги к силе сопротивления.
У первого прототипа акваскипера удлинение было еще больше:

К сожалению, удлинение крыла ограничивается геометрией судна и прочностью материалов.
Амплитуда не единственный параметр плавникового движителя, который требует оптимизации, в этом одна из сложностей его реализации.
Юнга
Отправлено 15 сентября 2019 - 14:22
Насчет кпд:
...
Вопрос в том, как сделать привод машущего крыла простым и эффективным, который бы не сводил все на нет.
Были идеи, к примеру, придать приводу резонансные свойства, снижающие потребление мощности на рабочей частоте...
не очень понятен тезис кпд ...
резонанс привода ? что это такое ?
В приводе есть колеблющиеся детали, имеющие массу и вобщем, малополезную инерцию.
Но если приделать к колеблющейся массе пружину, получим колебательную систему,
обладающую свойством резонанса на какой-то частоте. Тогда на этой частоте
снижается потребление мощности, т.е. "раскачать" привод будет легче.
Обратите внимание на резиновые амортизаторы, они для этой цели, на видео их два на каждое весло:
https://www.youtube....h?v=sM5qe0Hqzgw
Сообщение отредактировал Victor R: 15 сентября 2019 - 14:32
Яхтенный капитан
Отправлено 15 сентября 2019 - 14:47
1.Дорожка Кармана - это и есть вихревой след, принимающий такой вид при некоторых условиях, например при определенной скорости потока:
2.Вы такое движение пластинки (крыла) имели ввиду?
1. Дорожка Кармана - это набор упорядоченных вихрей. Их положение и интенсивность можно прогнозировать. Вихревой след за крылом - это стохастическая вихревая система. Ее называют турбулентностью. Для нее мы можем найти только осредненные характеристики. Почувствуйте разницу.
2. Такое, как на третьей картинке. А что будет с направлением вихрей, если мы расположим профиль иначе? И что скажете про сопротивление?

Яхтенный капитан

Отправлено 15 сентября 2019 - 16:34
Относительно скорости под "галанящим" веслом - https://www.youtube....mZ-Ln1-E&t=167s

Сообщение отредактировал утлюк: 15 сентября 2019 - 16:38
Юнга
Отправлено 15 сентября 2019 - 17:55
1. Дорожка Кармана - это набор упорядоченных вихрей. Их положение и интенсивность можно прогнозировать. Вихревой след за крылом - это стохастическая вихревая система. Ее называют турбулентностью. Для нее мы можем найти только осредненные характеристики. Почувствуйте разницу.
2. Такое, как на третьей картинке. А что будет с направлением вихрей, если мы расположим профиль иначе? И что скажете про сопротивление?
на этой картинке предполагается, что вместе с движением крыла вверх-вниз
одновременно изменяется и угол установки крыла:
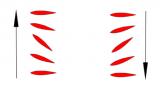
причем движение симметричное: скорость вверх-вниз одинаковая, скорости
разворота крыла тоже.
Если угол установки крыла не изменяется при движении (и не нулевой),
то будет отклонение вихревого следа (и отклонение вектора тяги).
Такое же отклонение будет при различии скорости движения вверх-вниз.

За счет этого возможно изменение направления движения, т.е. маневрирование.
Яхтенный капитан
Отправлено 15 сентября 2019 - 19:19
Не совсем понял Вас...
Если угол установки крыла не изменяется при движении (и не нулевой),
то будет отклонение вихревого следа (и отклонение вектора тяги).
Не знаю откуда Вы берете свои картинки, но многие из них вызывают сомнения.
Последние выглядят как полученные при отсутствии набегающего потока или очень малой его величине.
Я имел ввиду случай, когда крыло с некоторым постоянным углом атаки движется вверх-вниз. А потом мы меняем угол атаки на такой же, но противоположного знака.
Направление вращения вихрей изменится. Но даже если след будет отклонятся, вверх или вниз при углах атаки разного знака, знак продольной силы останется прежним.
Яхтенный капитан
Отправлено 15 сентября 2019 - 22:59
В приводе есть колеблющиеся детали, имеющие массу и вобщем, малополезную инерцию.
Но если приделать к колеблющейся массе пружину, получим колебательную систему,
обладающую свойством резонанса на какой-то частоте. Тогда на этой частоте
снижается потребление мощности, т.е. "раскачать" привод будет легче.
если уйти от знакопеременной амплитуды к вращению - вы сильно выиграете в КПД и в простоте
например как судовая установка я давал ссылку -лопасти вертикально
гребное колесо
Рулевой 1-го класса
Отправлено 15 сентября 2019 - 23:10
Яхтенный капитан
Отправлено 15 сентября 2019 - 23:50
акваскиппер прошлый век, вот как надо
эт такое же развлечение
из хьюман паур бот - декавитатор всех порвал оптом 
Относительно скорости под "галанящим" веслом -
чет ни один у академистов и гребунов не выиграл НИЧЕГО
Инопланетянин

Отправлено 17 сентября 2019 - 21:42
Траекторный угол движения лопасти относительно общего направления перемещения должен быть порядка 45 град для удлинения лопасти 5, тогда кпд равен под 90%. И перелом траектории при перемене направления движения лопасти должен быть резким, т.е. траектория должна быть пилой, а не синусоидой. По памяти привожу, считал когда-то для сравнения, что лучше - винт или плавник. Так что акваскипер отдыхает, там такие углы перекладки невозможнв, отсюда - хреновый кпд.акваскиппер прошлый век, вот как надо
https://www.youtube....h?v=3Ksamgpu2S0










0 пользователей, 0 гостей, 0 скрытых пользователей

Система для сообществ IP.Board
Лицензия зарегистрирована на: Журнал "КАТЕРА и ЯХТЫ"


