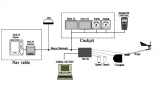



Использую ТР22 второй сезон. Мучаюсь вопросом - это нормально, что он все время работает?
На видео яхта идет ровно, волны нет, крена нет, паруса сбалансированы. Авторулевой непрерывно пашет, раздражая своим шумом и сжигая свой невиликий ресурс. Как-то это неправильно, на мой взгляд.
Менял все настройки рулевого. Менял настройки демпфирования бортового компьютера, все без толку.
Может у мне достался неисправный прибор?