

Aleksk не нужна абсолютная точность. Нужна высокая относительная. Повторяемость показаний нужна.
Наше



Разные приёмники GNSS
Автор
GStager
, 30 апр 2018 15:08
Сообщений в теме: 120

#103

Moder
-

- Администратор
-

- 2 212 сообщений
Яхтенный капитан
- Из:Москва
-
Судно: 34 фута
-
Название: Ирида
Отправлено 02 февраля 2020 - 13:43
. Если бы на дне было столько железа, тогда бы не нужно было добывать руду и плавить её. Сразу бы корабли поднимали и в топку.Автопилот вообще-то не для речек и тем более каналов (хотя я именно в канале шириной 30 метров окончательно отлаживал), он для открытой воды, когда ни берегов ни дна не видно, тем более затонувших корыт (лодка в силу инерционности системы проскочит не заметит, будя корыто на малой глубине).
Проблема надуманная.
Ну вот я и хожу, в основном, по небольшим водохранилищам и каналам. У меня есть raymarine, на Онеге он себя вел прекрасно, а вот "дома" -- все время скачет. И, на сколько я знаю, пассажирские теплоходы вполне пользуются автопилотами и на канале.
#104
Aleksk
-

- Капитан
-

- 14 777 сообщений
Яхтенный капитан
- Из:Ленинград
-
Судно: ⛵
-
Название: Неспешный
Отправлено 02 февраля 2020 - 13:48
Это Вы так и не поняли, что я Вам год назад ответил. Даже в картинках. А то Вы как-то всё понятиями времён GPS оперируете.
Короче - расслабьтесь, в китайском приёмнике gnss за 500 рублей всё хорошо и с приёмом, и с вычислениями, и для движущегося приёмника точность определения положения достаточна для адекватного позиционирования аж до 18 масштаба (меньше метра в пикселе). Если у Вас есть такие карты - я Вам завидую. На картинках же - три карты в 16 масштабе (2.5 метра в пикселе), и крупней масштаба у этих карт нет.
Я не по картам хожу, а по своему записанному ранее треку в разных узкостях типа Новоладожского канала шириной 30 метров и даже 15 метров в проходах на Ладогу , поэтому визуально могу отслеживать отклонение с точностью до метра.
За несколько лет отладки убедился, что в 99% времени отклонение от трека не более 3 метров, в основном не более 1..2 метра, но изредка (раз в несколько часов), кратковременное (в несколько секунд или десятков секунд) отклонение может достигать 10 метров и идешь вплотную к камышам. XTE тут не причем, он всегда колеблется в районе плюс минус метр, т.е. автопилот четко следует по заложенному треку. Отсюда следует , что значительная девиация координат обусловлена GNSS приемником. Поэтому и хочется более точный.
Сообщение отредактировал Aleksk: 02 февраля 2020 - 13:50
#105
FStager
-

- Капитан
-
- 1 777 сообщений
Яхтенный капитан
- Из:Москва
Отправлено 02 февраля 2020 - 17:19
За несколько лет отладки убедился, что в 99% времени отклонение от трека не более 3 метров, в основном не более 1..2 метра, но изредка (раз в несколько часов), кратковременное (в несколько секунд или десятков секунд) отклонение может достигать 10 метров
Ну это же совсем другое дело!
С одной стороны, я не наблюдаю никаких отскоков определения положения движущегося приёмника, с другой - у меня есть вот такая картинка:
То, что синенькое - это приёмник в пафосном современном телефоне. То, что жёлтенькое - приёмник в безымянном китайском планшете пятилетнего возраста. Правда, китайский планшет стоил почти в десять раз дороже телефона.
Поэтому - был бы Вам признателен, если бы Вы привели трек, показывающий эти самые отклонения раз в несколько часов.
#106
Григорий Ш.
-

- Капитан
-
- 2 332 сообщений
Яхтенный капитан
- Из:Москва
-
Судно: Sunwind 20
-
Название: SALACIA
Отправлено 02 февраля 2020 - 18:23
Как смотрю в Москве, на смартфоне показания текущей точки часто с большой систематической ошибкой, и прыгают тоже заметно. За городом лучше. О точности - недавно нам межевание участка делали, так кадастровые инженеры теперь тоже с GPS (ну или г. - во всяком случае спутниками) работают. Небольшая коробочка, в точку втыкают штатив-штырь и смотрят. Точность 1 см.
Вероятно не только спутники, но и как ее, "дифференциальная" система, но вот так.
#107
Aleksk
-
- Капитан
-
- 14 777 сообщений
Яхтенный капитан
- Из:Ленинград
-
Судно: ⛵
-
Название: Неспешный
Отправлено 03 февраля 2020 - 14:08
Поэтому - был бы Вам признателен, если бы Вы привели трек, показывающий эти самые отклонения раз в несколько часов.
Это не проблема. Только там вы ничего не увидите, либо увидите совсем не то, т.к. трек пишется не на внутренний, а на внешний приемник Гармин.
А это как говорят в Одессе - две больших разницы!
Отклонения от трека в виде XTE выводится только на экран автопилота, поэтому статистика пока умозрительная. Надо бы сделать запись в файл.
#108
FStager
-
- Капитан
-
- 1 777 сообщений
Яхтенный капитан
- Из:Москва
Отправлено 03 февраля 2020 - 15:07
Только там вы ничего не увидите, либо увидите совсем не то, т.к. трек пишется не на внутренний, а на внешний приемник Гармин.
Вот эту фразу я вообще не понял...
Короче - Вы же не всегда по треку ездите? Иногда и вдоль берега? Нет ли картинки, где вот вы ехали вдоль берега, а трек - раз, и скакнул? Или типа как выше - треки от двух приёмников?
#109
FStager
-
- Капитан
-
- 1 777 сообщений
Яхтенный капитан
- Из:Москва
Отправлено 03 февраля 2020 - 15:14
Вероятно не только спутники, но и как ее, "дифференциальная" система, но вот так.
Григорий, ты удивишься, но в китайских навигационных приёмниках за 500 рублей видимо применяется эта самая "дифференциальная система", только вместо второго приёмника на точке с известными координатами берётся некоторый предыдущий замер. При таком подходе на определение расстояния между замерами ошибка абсолютного позиционирования не влияет, и точность определения этого расстояния - первые десятки сантиметров. Потому и определение положения движущегося приёмника гораздо лучше, чем неподвижного.
#110
Aleksk
-
- Капитан
-
- 14 777 сообщений
Яхтенный капитан
- Из:Ленинград
-
Судно: ⛵
-
Название: Неспешный
Отправлено 03 февраля 2020 - 15:33
1. Вот эту фразу я вообще не понял...
2 . Короче - Вы же не всегда по треку ездите? Иногда и вдоль берега? Нет ли картинки, где вот вы ехали вдоль берега, а трек - раз, и скакнул? Или типа как выше - треки от двух приёмников?
1. В одно и тоже время, два разных приемника в одной геоточке дадут разные результаты. Автопилот берет данные из внутреннего приемника, а я с ручного Гармина.
2. Всегда по треку, а когда не по треку , то чисто по магнитометру без GNSS.
Я лучше скриншот с массива треков Гармин дам, сразу будет видно разброс в проблемном месте. Хотя это все равно будет не то, что надо (надо бы записывать трек с внутреннего приемника).
Сообщение отредактировал Aleksk: 03 февраля 2020 - 15:35
#111
Aleksk
-
- Капитан
-
- 14 777 сообщений
Яхтенный капитан
- Из:Ленинград
-
Судно: ⛵
-
Название: Неспешный
Отправлено 03 февраля 2020 - 15:43
А тем временем китайская группировка покрыла Россию как бык овцу. Под тестирование этого безобразия прикупил модуль GNSS ATGM336H-5N-31 GPS + BDS (Glonass там нет к счастью или огорчению).
#112
Aleksk
-
- Капитан
-
- 14 777 сообщений
Яхтенный капитан
- Из:Ленинград
-
Судно: ⛵
-
Название: Неспешный
Отправлено 04 февраля 2020 - 02:06
Я лучше скриншот с массива треков Гармин дам, сразу будет видно разброс в проблемном месте. Хотя это все равно будет не то, что надо (надо бы записывать трек с внутреннего приемника).
собственно скриншот (ширина разбега треков получается около 23 метров). Как желтую широкую дорожку вокруг тонкой линии убрать OpenCN (она на каждом треке, и мешаете смотреть при наложении)?
Прикрепленные изображения

#114
FStager
-
- Капитан
-
- 1 777 сообщений
Яхтенный капитан
- Из:Москва
Отправлено 04 февраля 2020 - 14:46
Я не понял картинку.собственно скриншот (ширина разбега треков получается около 23 метров)
Кружочек на конце синей линии - это где надо быть?
А другой конец синей линии - где оно было?
А откуда известно, что оно было именно там?
#115
Aleksk
-
- Капитан
-
- 14 777 сообщений
Яхтенный капитан
- Из:Ленинград
-
Судно: ⛵
-
Название: Неспешный
Отправлено 04 февраля 2020 - 17:02
Я не понял картинку.
Кружочек на конце синей линии - это где надо быть?
А другой конец синей линии - где оно было?
А откуда известно, что оно было именно там?
Объясняю.
Синее - это канал шириной около 30 метров. К карте привязан так себе.
Друг на друга наложены треки от ручного Гармина в количестве немного меньше 10.
Все треки сняты в разное время с разбросом от дней до года. Внутри автопилота находится GNSS NL3333.
Маршрут был заложен в автопилот один и тот же для всех полученных треков.
На картине имеем измерение рулеткой расстояния в метрах от крайнего до крайнего трека из всей совокупности треков в данном месте канала.
В итоге имеем условную полосу шириной 23 метра, в сечении которой которой лодка находится случайным образом .
Чтобы получить эту цифру, можно было бы не ездить, а снять статистику приемника за сутки, как это было сделано в посте https://forum.katera...gnss/?p=2230145
Сообщение отредактировал Aleksk: 04 февраля 2020 - 17:09
#116
FStager
-
- Капитан
-
- 1 777 сообщений
Яхтенный капитан
- Из:Москва
Отправлено 04 февраля 2020 - 18:36
Дык а кто обещал, что автопилот едет точно по маршруту?Все треки сняты в разное время с разбросом от дней до года. Внутри автопилота находится GNSS NL3333.
Маршрут был заложен в автопилот один и тот же для всех полученных треков.
Это был бы неподвижный приёмник.Чтобы получить эту цифру, можно было бы не ездить, а снять статистику приемника за сутки, как это было сделано в посте https://forum.katera...gnss/?p=2230145
#117
FStager
-
- Капитан
-
- 1 777 сообщений
Яхтенный капитан
- Из:Москва
Отправлено 04 февраля 2020 - 18:45
1. В одно и тоже время, два разных приемника в одной геоточке дадут разные результаты.
Оно да, но:
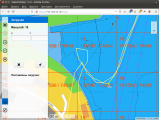
Жёлтая линия - китайский планшет, синяя - китайский приёмник за 500 рублей.
Максимальное расстояние между линиями в движении - ожидаемо - на повороте, и составляет примерно 6 метров. Реально между ними метра два, так что разница в определении положения - четыре метра.
Это много или мало?
#118
Aleksk
-
- Капитан
-
- 14 777 сообщений
Яхтенный капитан
- Из:Ленинград
-
Судно: ⛵
-
Название: Неспешный
Отправлено 04 февраля 2020 - 18:51
Дык а кто обещал, что автопилот едет точно по маршруту?
Я обещал. Выше писал, что отклонение от маршрута железный болван поддерживает в районе примерно 1 метра (XTR).
#121
FStager
-
- Капитан
-
- 1 777 сообщений
Яхтенный капитан
- Из:Москва
Отправлено 21 февраля 2020 - 13:44
Для желающих ездить по каналу с закрытыми глазами - свежая информация от Gary E. Miller:
"

barem9n.png is 86k samples from a u-blox NEO-M9N
rtcm3m9n.png is 86k samples from a u-blox NEO-M9N, with RTCM3 from a base about a mile away.
The NEO-M9N is a new u-blox L1 only part, with GPS, GLONASS, GALIELO and
BDS decoders. Bare kits for around $60.
Notice the CEP(50) improves from 1.112 meters to 1.128 meters with
rtcm3. Not a huge win. Not gonna keep your car in the lane.
An improvement of the bare 1.657 meter and rtcm2 2.617 meter CEP(50)
from a NEO-M8T (L1) with same antennas and location."
Ответить










Количество пользователей, читающих эту тему: 1
0 пользователей, 1 гостей, 0 скрытых пользователей

