
Пожалуйста, по теме пишите. Про эти авторулевые целая тема.
Наше


Авторулевой своими руками
Автор
StrangerM
, 28 дек 2011 11:44
Сообщений в теме: 659
#77

apred
-

- Капитан
-

- 1 465 сообщений
Яхтенный капитан
- Из:Киев
-
Судно: Кр. швертбот
-
Название: АМУЛЕТ
Отправлено 19 мая 2012 - 02:18
По моеиу, это единственный случай, когда один из наших коллег не стал заниматься охаиванием всего произведенного, а просто взял и начал что то делать. Получиться у него лучше или нет, трудно сказать. Но все равно, его целеустремленность вызывает уважение. За полгода сделан опытный образец, это замечательно. Успехов в испытаниях!
#78
StrangerM
-
- Модератор форума
-

- 15 683 сообщений
чужой
- Из:СПб
-
Судно: МН
-
Название: Stranger
Отправлено 01 июня 2012 - 10:09
Замкнул по скорости исполнительный привод. Через пасик подключил плоский движок подачи от СиДи привода к оси исполнительного движка, приклеил импровизированный тах к платформе кркпления силового двигателя. Замкнуть по положению не удалось, скорее всего известная проблема зазора между цепью и зубчатым колесом. Повезу в Питер дорабатывать.
На фотке видны: паразитное колесо, которое прижимает цепь к звездочке, вал ДПТ и маленький тах (приклеен герметиком к платформе крепления ДПТ).
Прикрепленные изображения

#79
StrangerM
-
- Модератор форума
-
- 15 683 сообщений
чужой
- Из:СПб
-
Судно: МН
-
Название: Stranger
Отправлено 16 июля 2012 - 22:54
Получены некоторые результаты.
1.Удалось замкнуть привод АР по положению.
2.Удалось получить около 2минут на спокойной воде работы САУ АР, далее она разваливается.
3.Ручное управление катером потенциометром довольно сложное.
Буду работать над САУ в ПК.
#81
Aleksk
-

- Капитан
-
- 13 767 сообщений
Яхтенный капитан
- Из:Ленинград
-
Судно: ⛵
-
Название: Неспешный
Отправлено 01 апреля 2016 - 15:58
Путем проб и ошибок за один год канадский школьник Vladislav Pomogaev сделал авторулевой на двух Ардуинах.
Самое главное, система таки работает, несмотря на отсутствие компенсации наклона магнитометра. В дальнейшем планирует приспособить на папин 38 футовый катамаран.
http://mozgochiny.ru...iey-avtopilota/

Сообщение отредактировал Aleksk: 01 апреля 2016 - 16:06
#82
StrangerM
-
- Модератор форума
-
- 15 683 сообщений
чужой
- Из:СПб
-
Судно: МН
-
Название: Stranger
Отправлено 01 апреля 2016 - 17:13
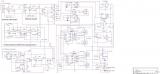
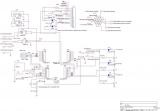
Да я уж писал - не до него было, в этом году допилю. Вот схемки -САУ на TIVA-C от TI и привода для штуртроса. Не показан ДП штуртроса и ПК верхнего уровня с Ozi дающим NMEA APB на USB/COM преобразователь, ну и еще один доп GPS приемник. :-)
Прикрепленные изображения
#83
StrangerM
-
- Модератор форума
-
- 15 683 сообщений
чужой
- Из:СПб
-
Судно: МН
-
Название: Stranger
Отправлено 01 апреля 2016 - 17:33
Еще на этот сезон (вы помните, катер в Приозерске): установить Планар 2Д 24, установить радар FURUNO, новую антенну речного диапазона и еще по мелочи.
Кстати, на МЕГА у меня был пробный вариант - не тянет по скорости. 8 р-дов 16 МГц (вроде), так что пусть хлопец переходит на продукцию от TI, стоит копейки, развитая периферия, куча пинов, 32 р-да и 72 МГц.
#84
Aleksk
-
- Капитан
-
- 13 767 сообщений
Яхтенный капитан
- Из:Ленинград
-
Судно: ⛵
-
Название: Неспешный
Отправлено 01 апреля 2016 - 19:12
Используемый тильт компенсированный компас выдает сразу азимут, или как обычно только значения осей? Если используется азимут для быстрого контура реагирования, то как победили скачек на границе 0, 360 градусов (это когда направление строго на север) ?
Сообщение отредактировал Aleksk: 01 апреля 2016 - 19:18
#87
Aleksk
-
- Капитан
-
- 13 767 сообщений
Яхтенный капитан
- Из:Ленинград
-
Судно: ⛵
-
Название: Неспешный
Отправлено 29 апреля 2016 - 23:40
Справочник судового электромеханика по авторулевым. В книге довольно много ценных цифр и графиков.
http://extraden.ru/d...v.gorina.a..pdf
#88
Aleksk
-
- Капитан
-
- 13 767 сообщений
Яхтенный капитан
- Из:Ленинград
-
Судно: ⛵
-
Название: Неспешный
Отправлено 30 апреля 2016 - 01:09
В качестве бесконтактного датчика положения пера руля можно использовать микроконтроллер [color=rgb(0,0,0);font-family:Roboto, arial, sans-serif;font-size:13px;]КМА210 с встроенным магниторезистивным датчиком и аналоговым выходом. Возможно, проще купить готовый модуль с этой микросхемой и с магнитом внутри, например бесконтактный датчик положения дроссельной заслонки ВТН 3102.3855 для инжекторных ВАЗ (цена около 700 руб).[/color]
#89
Aleksk
-
- Капитан
-
- 13 767 сообщений
Яхтенный капитан
- Из:Ленинград
-
Судно: ⛵
-
Название: Неспешный
Отправлено 18 мая 2016 - 01:07
Ардуинщики разных стран понастроили автопилотов вагон и маленькую тележку...код, что характерно , никто не спешит выкладывать. 
http://pilotoarduino.blogspot.ru/
Сообщение отредактировал Aleksk: 18 мая 2016 - 02:47
#90
Aleksk
-
- Капитан
-
- 13 767 сообщений
Яхтенный капитан
- Из:Ленинград
-
Судно: ⛵
-
Название: Неспешный
Отправлено 18 мая 2016 - 01:11
Линейный актуатор на усилие 50..100 кг, доступен в Питерена Авито за 4..4,5 тыс. руб..
http://www.microbot....5cm-s-50Kg.html
Сообщение отредактировал Aleksk: 18 мая 2016 - 01:12
#91
filichev
-

- Капитан
-
- 1 566 сообщений
Яхтенный капитан
- Из:SPb
-
Судно: Bavaria 30
Отправлено 18 мая 2016 - 09:57
Линейный актуатор на усилие 50..100 кг, доступен в Питерена Авито за 4..4,5 тыс. руб..
У него свободного хода (или клатча) нет вроде. Как рулить то, когда автопилот не нужен? Руками тягу с сектора снимать? Не факт, что там червяк с большим шагом или рейка, которые позволят двигать шток "вручную"
Сообщение отредактировал filichev: 18 мая 2016 - 10:05
#93
Aleksk
-
- Капитан
-
- 13 767 сообщений
Яхтенный капитан
- Из:Ленинград
-
Судно: ⛵
-
Название: Неспешный
Отправлено 18 мая 2016 - 10:52
У него свободного хода (или клатча) нет вроде. Как рулить то, когда автопилот не нужен? Руками тягу с сектора снимать? Не факт, что там червяк с большим шагом или рейка, которые позволят двигать шток "вручную"
Отстегнуть от румпеля - пара секунд, какие проблемы?
А то что при снятии напряжения с двигателя, держит мертво, так это только в плюс. Экономия энергии, ведь мотор только иногда включается при подруливании.
Именно такие актуаторы используют самоделкины , как видно на роликах.
#94
filichev
-
- Капитан
-
- 1 566 сообщений
Яхтенный капитан
- Из:SPb
-
Судно: Bavaria 30
Отправлено 18 мая 2016 - 13:05
Это у вас румпель )), но достаточно много лодок с баранкой, где такой привод ставится под палубой как второй шток от штурвального механизма к рычагу на балере
У реймарина и прочих линейные приводы имеют отдельный соленойд зацепления.
#95
Aleksk
-
- Капитан
-
- 13 767 сообщений
Яхтенный капитан
- Из:Ленинград
-
Судно: ⛵
-
Название: Неспешный
Отправлено 18 мая 2016 - 13:08
Это у вас румпель )), но достаточно много лодок с баранкой, где такой привод ставится под палубой как второй шток от штурвального механизма к рычагу на балере
У реймарина и прочих линейные приводы имеют отдельный соленойд зацепления.
Осталось сравнить цены. Ведь речь о самоделке. Там где штурвал, наверное лучше гидравлику использовать.
#96
Aleksk
-
- Капитан
-
- 13 767 сообщений
Яхтенный капитан
- Из:Ленинград
-
Судно: ⛵
-
Название: Неспешный
Отправлено 21 мая 2016 - 19:17
Линейный актуатор на усилие 50..100 кг, доступен в Питерена Авито за 4..4,5 тыс. руб..
как актуатор работает-жужжит ( используется ШИМ)на столе от Н-моста , интегрированного в сильноточную микросхему [color=rgb(51,51,51);font-family:Roboto, arial, sans-serif;font-size:13px;]VNH2SP30 (цена 30 амперного драйвера на около 250.. 500 руб). [/color]
Ток холостого хода около 1 ампера, что конечно же, многовато для автопилота.
Сообщение отредактировал Aleksk: 22 мая 2016 - 00:28
#97
Aleksk
-
- Капитан
-
- 13 767 сообщений
Яхтенный капитан
- Из:Ленинград
-
Судно: ⛵
-
Название: Неспешный
Отправлено 22 мая 2016 - 01:08
GY953 на али всего за 1 т.р. Это дешевле в восемь раз по сравнению с компасом CMPS10, который выше использовал автор топика.
32-разрядный процессор обработки, тильт компенсация, уарт и эспиай.
https://vk.com/glebe...3417886_321/all
GY-953 works! Magic initialisation sequences: A5 45 EA - binary angles A5 55 FA - text angles A5 57 FC - calibration
https://www.instagra...m/p/-w_LibsnX1/
sscom3.2 - терминальная прога
http://www.electrodragon.com/w/SSCOM32
Сообщение отредактировал Aleksk: 22 мая 2016 - 01:59
#98
Aleksk
-
- Капитан
-
- 13 767 сообщений
Яхтенный капитан
- Из:Ленинград
-
Судно: ⛵
-
Название: Неспешный
Отправлено 24 мая 2016 - 17:14
Вагущенко , Цымбал
СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА
Третье издание переработанное и дополненное. 2007. https://yadi.sk/i/0_W0m-yErxKua
#99
StrangerM
-
- Модератор форума
-
- 15 683 сообщений
чужой
- Из:СПб
-
Судно: МН
-
Название: Stranger
Отправлено 19 июля 2017 - 19:53
Про маленький руль и компас попало сюда http://forum.katera....lem-i-kompasom/
#100
Aleksk
-
- Капитан
-
- 13 767 сообщений
Яхтенный капитан
- Из:Ленинград
-
Судно: ⛵
-
Название: Неспешный
Отправлено 14 октября 2017 - 01:30
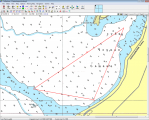
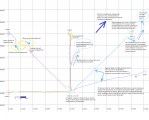
Собственно второй сезон закончен. Авторулевой обучен ходить по прямой (дуге большого круга) между точками, в пределе до 1000 км, с погрешностью 2,7м. Защита от пропадания питания (помнит все настойки и путевые точки). Автоматический возврат на маршрут , независимо от расстояния.
Компас на ATmega328p(с компенсацией наклона) на магнитометре и акселерометре MPU6050. Основной блок на Duinomite.
Прикрепленные изображения
Сообщение отредактировал Aleksk: 14 октября 2017 - 01:50
Ответить









Количество пользователей, читающих эту тему: 0
0 пользователей, 0 гостей, 0 скрытых пользователей

